مدلسازی انگشت روبات در سیم اسکیپ مالتی بادی Simscape Multibody به همراه فایل و آموزش

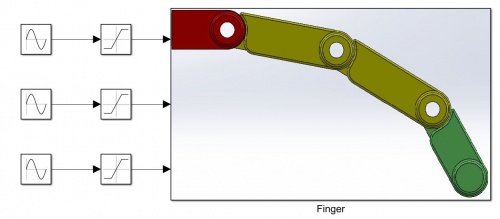
در این آموزش یک مدل از انگشت روبات سه درجه آزادی که در نرم افزار سالیدورکز آماده شده است توسط بسته ی سیم اسکیپ مالتی بادی مدلسازی و تحلیل دینامیکی میشود. نرم افزار سیم اسکیپ یک بسته ی تحلیلی در نرم افزار متلب است که تحلیل های دینامیکی چند جسمی را انجام میدهد. این مجموعه شامل مدل سالیدورکز، مدلسازی سیم اسکیپ و همچنین یک فایل آموزشی از مراحل انجام شبیه سازی در نرم افزار است. محتوای اموزشی و مدلسازی انجام شده توسط دکتر محسن رضائی ( دکتری مکانیک از دانشگاه شیراز ) تهیه شده است. جهت کسب اطلاعات بیشتر میتوانید به سایت اصلی مکانیک سافت مراجعه نمایید. www.mechanicsoft.ir فایل شامل:1- مدل سه بعدی 2- فایل شبیه سازی سیم اسکیپ 3- فایل توضیحات آموزشی 4- ویدیو و عکس های شبیه سازی است. …
سایت کتاب دانشگاه همراه همیشگی شما تا رسیدن به هدف


